This technical report is the second phase technical report of Project "Enriching Offline Reinforcement Learning Algorithms in ReinforcementLearning.jl" in OSPP. It includes two components: project information and completed work.
Project name: Enriching Offline Reinforcement Learning Algorithms in ReinforcementLearning.jl
Scheme Description: Recent advances in offline reinforcement learning make it possible to turn reinforcement learning into a data-driven discipline, such that many effective methods from the supervised learning field could be applied. Until now, the only offline method provided in ReinforcementLearning.jl is Behavior Cloning (BC). We'd like to have more algorithms added like Batch Constrain deep Q-Learning (BCQ), Conservative Q-Learning (CQL). It is expected to implement at least three to four modern offline RL algorithms.
Time planning: the following is a relatively simple time table.
| Date | Work |
|---|
| Prior - June 30 | Preliminary research, including algorithm papers, ReinforcementLearning.jl library code, etc. |
| The first phase | |
| July1 - July15 | Design and build the framework of offline RL. |
| July16 - July31 | Implement and experiment offline DQN and offline SAC as benchmark. |
| August1 - August15 | Write build-in documentation and technical report. Implement and experiment CRR. |
| The second phase | |
| August16 - August31 | Implement and experiment PLAS. |
| September1 - September15 | Research, implement and experiment new SOTA offline RL algorithms. |
| September16 - September30 | Write build-in documentation and technical report. Buffer for unexpected delay. |
| After project | Carry on fixing issues and maintaining implemented algorithms. |
It summarizes all the results of the second phase.
In the second phase, we finished the offline RL algorithms: BCQ, Discrete-BCQ, BEAR(UWAC), FisherBRC. CRR and PLAS are detailed in the report of the first phase. Except for algorithms in discrete action space (such as Discrete-BCQ, Discrete-CRR), all algorithms can run on CPU and GPU, because CartesianIndex is not supported in GPU.
Batch-Constrained deep Q-Learning (BCQ) uses distribution matching to constrain policy. The pseudocode of BCQ:
BCQ needs to train a VAE to sample actions based on the next state. We train VAE for a period of time, and then train VAE and BCQ learner simultaneously to ensure the quality of the generated actions. When sampling actions, we randomly samples hidden states instead of generating hidden states in PLAS. Therefore, we re-implement decode function in VAE:
function decode(rng::AbstractRNG, model::VAE, state, z=nothing; is_normalize::Bool=true)
if z === nothing
z = clamp.(randn(rng, Float32, (model.latent_dims, size(state)[2:end]...)), -0.5f0, 0.5f0)
z = send_to_device(device(model), z)
end
a = model.decoder(vcat(state, z))
if is_normalize
a = tanh.(a)
end
return a
end
And it needs a perturbation network:
Base.@kwdef struct PerturbationNetwork{N}
base::N
ϕ::Float32 = 0.05f0
end
Perturbation network is used to increase the robustness of the action:
function (model::PerturbationNetwork)(state, action)
x = model.base(vcat(state, action))
x = model.ϕ * tanh.(x)
clamp.(x + action, -1.0f0, 1.0f0)
end
Please refer to this link for specific code (link). The brief function parameters are as follows:
mutable struct BCQLearner{BA1, BA2, BC1, BC2, V} <: AbstractLearner
policy::BA1
target_policy::BA2
qnetwork1::BC1
qnetwork2::BC2
target_qnetwork1::BC1
target_qnetwork2::BC2
vae::V
p::Int
start_step::Int
end
In BCQ, we use PerturbationNetwork: π(s,a)→a to model policy and use Q(s,a) to model Q-network.
p is a hyper-parameter used for repeating states to obtain better Q estimation. For example, BCQ repeats states and obtains the actions and Q-values. Then it chooses an action with the highest Q-value.
function (l::BCQLearner)(env)
s = send_to_device(device(l.policy), state(env))
s = Flux.unsqueeze(s, ndims(s) + 1)
s = repeat(s, outer=(1, 1, l.p))
action = l.policy(s, decode(l.vae.model, s))
q_value = l.qnetwork1(vcat(s, action))
idx = argmax(q_value)
action[idx]
end
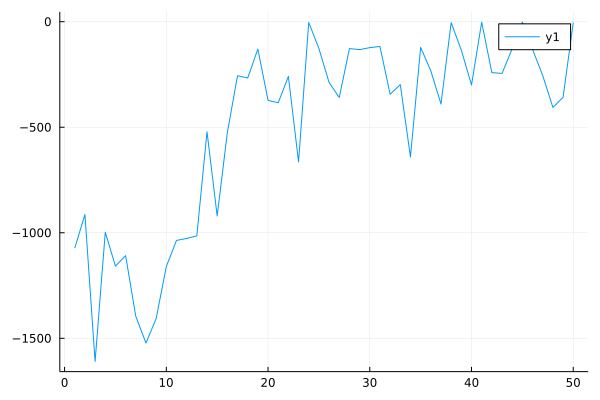
start_step represents the steps to train VAE alone.
Performance curve of BCQ algorithm in Pendulum (start_step=1000):
Discrete BCQ is a simple offline RL algorithm in discrete action space. Its pseudocode is as follow:
The core of Discrete BCQ is calculating a mask of actions. We calculate the probability of actions in a given state and divide it by the maximum probability value. Then, we compare this value with the threshold. If this value is less than the threshold, the corresponding action will not be selected.
prob = softmax(learner.approximator.actor(s), dims=1)
mask = Float32.((prob ./ maximum(prob, dims=1)) .> learner.threshold)
new_q = q .* mask .+ (1.0f0 .- mask) .* -1f8
Please refer to this link for specific code (link). The brief function parameters are as follows:
mutable struct BCQDLearner{Aq, At} <: AbstractLearner
approximator::Aq
target_approximator::At
θ::Float32
threshold::Float32
end
In Discrete BCQ, we use the Actor-Critic structure. The Critic is modeled as Q(s,⋅), and the Actor is modeled as L(s,⋅) (likelihood of the state).
θ is the regularization coefficient. When calculating the loss in Discrete BCQ, it uses the likelihood of the state to regularize:
logit = AC.actor(s)
actor_loss + critic_loss + θ * mean(logit .^ 2)
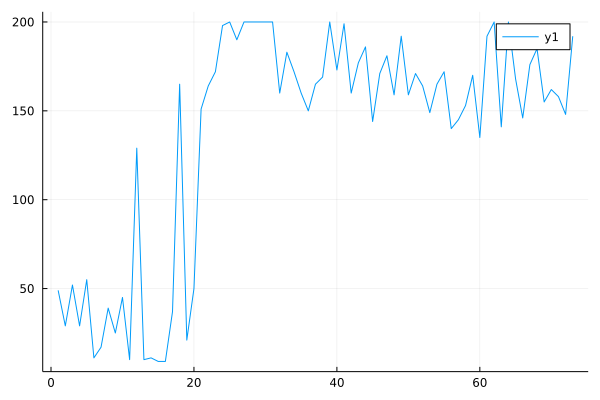
Performance curve of Discrete BCQ algorithm in CartPole:
Bootstrapping error accumulation reduction (BEAR) is a policy-constraint method, which uses support constrain instead of distribution matching in BCQ. Its pseudocode is as follow:
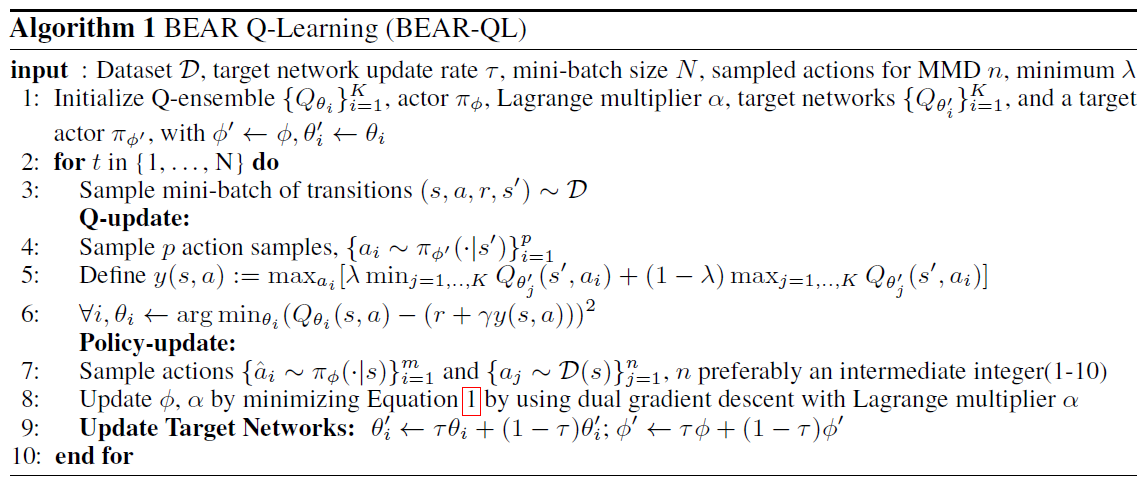

The equation 1:
πϕ:=π∈△∣S∣maxEs∈DEa∼π(⋅∣s)[j=1,⋯,KminQ^j(s,a)]s.t.Es∈D[MMD(D(s),π(⋅∣s))]≤ε The Actor update is the main improvement part of BEAR. We need to train a VAE to simulate sampling action from the dataset. The training of the VAE and the learner are synchronized. Then we sample action by the Actor and calculate maximum mean discrepancy (MMD) loss:
function maximum_mean_discrepancy_loss(raw_sample_action, raw_actor_action, type::Symbol, mmd_σ::Float32=10.0f0)
A, B, N = size(raw_sample_action)
diff_xx = reshape(raw_sample_action, A, B, N, 1) .- reshape(raw_sample_action, A, B, 1, N)
diff_xy = reshape(raw_sample_action, A, B, N, 1) .- reshape(raw_actor_action, A, B, 1, N)
diff_yy = reshape(raw_actor_action, A, B, N, 1) .- reshape(raw_actor_action, A, B, 1, N)
diff_xx = calculate_sample_distance(diff_xx, type, mmd_σ)
diff_xy = calculate_sample_distance(diff_xy, type, mmd_σ)
diff_yy = calculate_sample_distance(diff_yy, type, mmd_σ)
mmd_loss = sqrt.(diff_xx .+ diff_yy .- 2.0f0 .* diff_xy .+ 1.0f-6)
end
The loss of actor is:
J=−Qθ^(s,a)+α×MMD(D(s),π(⋅∣s)) Besides, lagrangian multiplier α needs to be updated synchronously:
J=−Qθ^(s,a)+α×(MMD(D(s),π(⋅∣s))−ε) Please refer to this link for specific code (link). The brief function parameters are as follows:
mutable struct BEARLearner{BA1, BA2, BC1, BC2, V, L} <: AbstractLearner
policy::BA1
target_policy::BA2
qnetwork1::BC1
qnetwork2::BC2
target_qnetwork1::BC1
target_qnetwork2::BC2
vae::V
log_α::L
ε::Float32
p::Int
max_log_α::Float32
min_log_α::Float32
sample_num::Int
kernel_type::Symbol
mmd_σ::Float32
end
In BEAR, we use Q(s,a) to model the Q-network and use a gaussian network to model the policy. log_α is a Lagrange multiplier implemented by a NeuralNetworkApproximator.
ε is used to update the Lagrangian multiplier. p is a hyper-parameter like BCQ. max_log_α and min_log_α are used to clamp the log_α. sample_num represents how many samples we sample to calculate MMD loss. mmd_σ is used to adjust the size of MMD loss. kernel_type=:laplacian/:gaussian represents what method we use to calculate MMD loss:
function calculate_sample_distance(diff, type::Symbol, mmd_σ::Float32)
if type == :gaussian
diff = diff .^ 2
elseif type == :laplacian
diff = abs.(diff)
else
error("Wrong parameter.")
end
return vec(mean(exp.(-sum(diff, dims=1) ./ (2.0f0 * mmd_σ)), dims=(3, 4)))
end
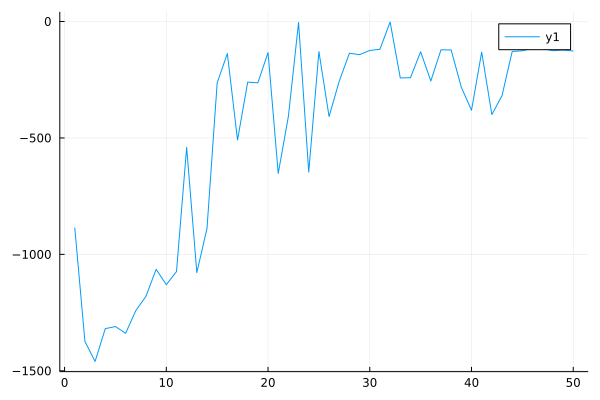
Performance curve of BEAR algorithm in Pendulum:
Uncertainty Weighted Actor-Critic (UWAC) is an improvement of BEAR. It can be implemented by adding Dropout in BEAR's Q network.
FisherBRC is a policy-constraint offline RL algorithm, which uses Fisher distance to constrain policy. The pseudocode of FisherBRC:
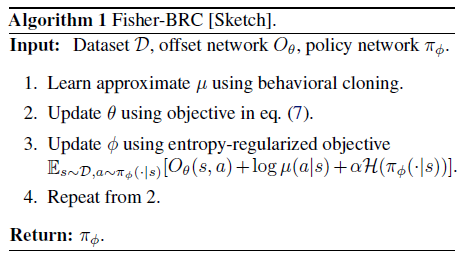
Firstly, it needs to pre-train a behavior policy μ using Behavior Cloning. In official python implementation, it adds an entropy term in the negative log-likelihood of actions in a given state. Mathematical formulation:
L(μ)=E[−logμ(s∣a)+αH(μ)] Besides, it automatically adjusts entropy term like SAC:
J(α)=−αEat∼μt[logμ(at∣st)+Hˉ] Where Hˉ is target entropy. But in ReinforcementLearningZoo.jl, BehaviorCloningPolicy does not contain the entropy term and does not support continuous action space. So, we define EntropyBC:
mutable struct EntropyBC{A<:NeuralNetworkApproximator}
policy::A
α::Float32
lr_alpha::Float32
target_entropy::Float32
policy_loss::Float32
end
Users only need to set parameter policy and lr_alpha. policy usually uses a GaussianNetwork. lr_alpha is the learning rate of α, which is an entropy term. target_entropy is set to −dim(A), and A is action space.
Afterward, the FisherBRC learner is updated. When updating Actor, it adds an entropy term in Q-value loss and automatically adjusts entropy. It updates Critic by this equation:
θminJ(Oθ+logμ(a∣s))+λEs∼D,a∼πϕ(⋅∣s)[∥∇aOθ(s,a)∥2] There are a few key concepts that need to be introduced. J is the standard Q-value loss function. Oθ(s,a) is offset network:
Qθ(s,a)=Oθ(s,a)+logμ(a∣s) Instead of Qθ(s,a), Oθ(s,a) will provide a richer representation of Q-values. However, this parameterization can potentially put us back in the fully-parameterized Qθ regime of vanilla actor critic. So it uses a gradient penalty regularizer of the form ∥∇aOθ(s,a)∥. The implementation is as follows:
a_policy = l.policy(l.rng, s; is_sampling=true)
q_grad_1 = gradient(Flux.params(l.qnetwork1)) do
q1 = l.qnetwork1(q_input) |> vec
q1_grad_norm = gradient(Flux.params([a_policy])) do
q1_reg = mean(l.qnetwork1(vcat(s, a_policy)))
end
reg = mean(q1_grad_norm[a_policy] .^ 2)
loss = mse(q1 .+ log_μ, y) + l.f_reg * reg
end
Please refer to this link for specific code (link). The brief function parameters are as follows:
mutable struct FisherBRCLearner{BA1, BC1, BC2} <: AbstractLearner
policy::BA1
behavior_policy::EntropyBC
qnetwork1::BC1
qnetwork2::BC2
target_qnetwork1::BC1
target_qnetwork2::BC2
α::Float32
f_reg::Float32
reward_bonus::Float32
pretrain_step::Int
lr_alpha::Float32
target_entropy::Float32
end
In FisherBRC, policy is modeled as gaussian network and Q-network is modeled as O(s,a).
f_reg is the regularization parameter of ∥∇aOθ(s,a)∥. reward_bonus is generally set to 5, which is added in the reward to improve performance. pretrain_step is used for pre-training behavior_policy. α, lr_alpha and target_entropy are parameters used to add an entropy term and automatically adjust the entropy.
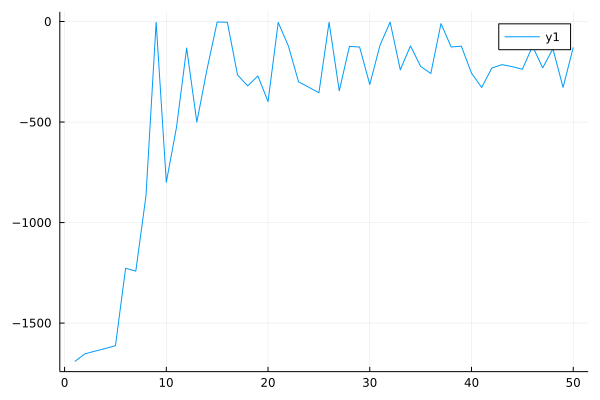
Performance curve of FisherBRC algorithm in Pendulum (pertrain_step=100):
To show performance of the above algorithms, we add some built-in experiments in ReinforcementLearningExperiments.jl.
If it is an algorithm on the continuous action space, we test it in Pendulum, otherwise we test it on CartPole.
We collect the dataset by gen_JuliaRL_dataset function (source):
struct JuliaRLTransition
state
action
reward
terminal
next_state
end
function gen_JuliaRL_dataset(alg::Symbol, env::Symbol, type::AbstractString; dataset_size::Int)
dataset_ex = Experiment(
Val(:GenDataset),
Val(alg),
Val(env),
type;
dataset_size = dataset_size)
run(dataset_ex)
dataset = []
s, a, r, t = dataset_ex.policy.trajectory.traces
for i in 1:dataset_size
push!(dataset, JuliaRLTransition(s[:, i], a[i], r[i], t[i], s[:, i+1]))
end
dataset
end
Specifically, we first run the built-in data collection experiment. For CartPole environment, we use BasicDQN to collect the dataset. For Pendulum, SAC is used. Then we turn the trajectory into a vector of JuliaRLTranstion.
We can run the offline RL experiments with the following commands (list all supported commands):
run(E`JuliaRL_BCQ_Pendulum(type)`)
run(E`JuliaRL_BCQD_CartPole(type)`)
run(E`JuliaRL_BEAR_Pendulum(type)`)
run(E`JuliaRL_CRR_Pendulum(type)`)
run(E`JuliaRL_CRR_CartPole(type)`)
run(E`JuliaRL_FisherBRC_Pendulum(type)`)
run(E`JuliaRL_PLAS_Pendulum(type)`)
type represents the method of collecting dataset, which can be random, medium or expert. random means dataset generated by the random agent, and medium uses an agent trained from scratch to convergence, and expert uses an agent that has converged. For example:
run(E`JuliaRL_BCQ_Pendulum(medium)`)
The implemented algorithms in this project contain most of the policy constraint methods in offline reinforcement learning (including distribution matching, support constrain, implicit constraint, behavior cloning). And these algorithms cover both discrete and continuous action spaces. Besides, we have them tested with various datasets, including random, medium, and expert.